[Note] Computer Graphics from Scratch - Part I: Raytracing
Back「渲染」这个动词可以理解成把「看到」的三维世界绘制在一个二维的平面上。要做到这一点,需要一些定义:
| 场景(scene) | 我们需要观测的三维空间 |
| 摄像机(camera) | 用来观测三维空间的相机 |
| 视口(viewport) | 在三维空间里放置的一扇「窗户」,所有透过这扇窗、射入 camera 的光,组成了需要被渲染的 2D 图像 |
| 画布(canvas) | 2D 图像实际被绘制的地方,在 Web 中,它一般是 canvas 元素 |
坐标系说明:
| scene | viewport | canvas |
|---|---|---|
 |
 |
 |
| 场景坐标系是一个右手坐标系,x y 轴分别指向右方和上方,z 轴指向前方 | 视口坐标系是一个常规的 2D 坐标系,原点位于正中央 | canvas 是我们要绘制的对象,它的坐标系默认是原点在左上方,且绘制的时候是需要以 px 为单位的,测试的时候我们设画布尺寸为 400px × 400px |
定义好坐标系之后,就能把渲染要做的事情串联起来了:

我们设 viewport 尺寸是 1 × 1(单位不重要,所以这里省去),其中心位于 scene 坐标系的
如何计算 viewport 上应该绘制什么呢?从 camera 发射光线,由于 canvas 是 400px 的长宽,那我们就发射 400 × 400 条光线,均匀射向 viewport 上的每个区域,从左上角到右下角,按 viewport 的坐标来看,它们分别是:
(-0.5 + 0/400, -0.5 + 0/400, 1) -> (-0.5, -0.5, 1) 左上角
(-0.5 + 1/400, -0.5 + 1/400, 1)
(-0.5 + 2/400, -0.5 + 2/400, 1)
...
(-0.5 + 399/400, -0.5 + 399/400, 1) -> ( 0.5, 0.5, 1) 右下角如果射出的这条线击中了物体,则这个对应的位置就渲染相应的颜色,否则就展示场景的背景色。至于击中物体时展示什么颜色,那就是光线追踪算法的主要部分了。
有了整个链路大概做什么,我们就可以把代码框架写出来了。我的实现里使用了 gl-matrix 来做向量计算,vec3 就来自它。
function main() {
for (let x = -400 / 2; x < 400 / 2; x++) {
for (let y = -400 / 2; y < 400 / 2; y++) {
// 从 camera 指向 viewport 上的向量
const direction = vec3.fromValues(x * (1 / 400), y * (1 / 400), 1);
// 追踪每一条射出的光线, 得到最终颜色绘制在 canvas 上
const color = traceRay(camera.position, direction);
// 由于 canvas 的坐标原点在左上角, 和 viewport 不一致, 所以这里转换一下
putPixel(x + 400 / 2, -y + 400 / 2, color);
}
}
}基本实现
最基本的实现是先把球的形状画出来,即如果射出的光线击中了球体,我们就让这条光线返回球体的颜色。这里我们会遇到第一个问题,如何判断光线是否击中了球体?
我们选择球体作为场景中的物体是有原因的——它的表示方程十分简单:
其中
光线的方程也很简单,出发点加上一个方向向量即可:
只需改变
如果方程有解,则说明光线击中了球体。而恰好判断一元二次方程是否有解有个简单的式子:
所以判断是否击中球体的代码就呼之欲出了:
function intersectRaySphere(origin, direction, sphere) {
const CO = vec3.create();
vec3.subtract(CO, origin, sphere.center);
const a = vec3.dot(direction, direction);
const b = 2 * vec3.dot(CO, direction);
const c = vec3.dot(CO, CO) - sphere.radius * sphere.radius;
const discriminant = b * b - 4 * a * c;
if (discriminant < 0) {
return [Infinity, Infinity];
}
const sqrtDiscriminant = Math.sqrt(discriminant);
const t1 = (-b + sqrtDiscriminant) / (2 * a);
const t2 = (-b - sqrtDiscriminant) / (2 * a);
return [t1, t2];
}intersectRaySphere 函数不仅做了判断,还返回了两个解
所以对于每条光线,我们需要遍历场景中的所有物体,计算击中点,并选取最近的那个。值得注意的是,main() 中调用 traceRay() 的时候,我们传入 minT=1 和 maxT=Infinity。
function getClosestIntersection(origin, direction, tMin, tMax) {
let closestT = Infinity;
let closestSphere = null;
for (const sphere of scene.spheres){
const [t1, t2] = intersectRaySphere(origin, direction, sphere);
if (t1 < closestT && t1 > tMin && t1 < tMax) {
closestT = t1;
closestSphere = sphere;
}
if (t2 < closestT && t2 > tMin && t2 < tMax) {
closestT = t2;
closestSphere = sphere;
}
}
return [
closestSphere,
closestT
];
}
function traceRay(cameraPosition, direction, minT, maxT) {
const [closestSphere, closestT] = getClosestIntersection(cameraPosition, direction, minT, maxT);
if (closestSphere === null) {
return scene.backgroundColor;
}
return closestSphere.color;
}我们在空间里放置三小一大四个不同颜色的球体,渲染出来的效果如下:
光线
上面我们把球体渲染出来了,但很显然看着非常不真实,一个很大的原因是没有光照效果。我们可以把现实世界中的光大致概括成三种:
- 环境光(ambient light):均匀照亮场景的光,没有方向性
- 平行光(directional light):从一个方向照射过来的光,光线是平行的
- 点光源(point light):从一个点向四面八方发射的
环境光是最简单的,我们认为它均匀地照亮场景中的每个点。
平行光源也会照亮整个场景,但是光照的强度会和光线和物体表面的夹角相关。这也是地球会有热带、温带、寒带的原因——太阳光是平行光源,赤道附近的光线和地面接近垂直,光照强度高,而两极附近的光线和地面法线有更大的夹角,光照强度低。

有了感性认知,之后,我们需要关心的是,既然光照强度与夹角相关,我们如何计算这个夹角呢?
考虑一束宽度为

所以如果平行光本身强度为
一个值得注意的点是这里的
球体的表面法线
有了这些知识,点光源的问题也可以解决了,因为点光源的光线强度其实也是根据夹角计算,和平行光源并无本质区别。唯一的区别是,点光源有一个光源位置,后面计算阴影的时候需要考虑这一点。
下面开始实现光照的代码,在场景中添加三种光源(光源类的定义省去了):
export const scene = {
// ...
lights: [
new AmbientLight(0.2), // 强度为 0.2 的环境光
new PointLight(0.6, vec3.fromValues(2, 1, 0)), // 强度为 0.6,位置为 (2, 1, 0) 的点光源
new DirectionalLight(0.2, vec3.fromValues(1, 4, 4)), // 强度为 0.2,方向为 (1, 4, 4) 的平行光
],
}在 traceRay() 函数中, 计算击中点的光照强度,然后根据光照强度调整颜色值:
function traceRay(cameraPosition, direction, minT, maxT) {
const [closestSphere, closestT] = getClosestIntersection(cameraPosition, direction, minT, maxT);
if (closestSphere === null) {
return scene.backgroundColor;
}
// 击中点: P = O + tD
const intersectionPoint = vec3.create();
vec3.scaleAndAdd(intersectionPoint, cameraPosition, direction, closestT);
// 击中点法线: N = P - C
const normal = vec3.create();
vec3.subtract(normal, intersectionPoint, closestSphere.center);
vec3.normalize(normal, normal);
// 最终颜色为球体颜色 * 光照强度
return vec3.scale(vec3.create(), closestSphere.color, computeLighting(intersectionPoint, normal));
}光照强度的计算在 computeLighting() 函数中实现,对于每个击中点,遍历场景中的所有光源,并计算该光源在当前点的光照强度,最后累加起来:
function computeLighting(point, normal) {
let intensity = 0;
for (const light of scene.lights){
if (light instanceof AmbientLight) {
// 环境光直接累加强度
intensity += light.intensity;
} else {
let l = vec3.create();
if (light instanceof PointLight) {
// 点光源: 计算从击中点指向光源的向量
vec3.subtract(l, light.position, point);
} else {
// 平行光: 方向向量就是光源方向
l = light.direction;
}
// 如果 cos(θ) > 0, 则累加光照强度
const nDotL = vec3.dot(normal, l);
if (nDotL > 0) {
intensity += light.intensity * nDotL / (vec3.length(normal) * vec3.length(l));
}
}
}
return intensity;
}高光
有了光照效果之后渲染结果看起来真实了很多,但还差点意思。因为我们之前默认每个球体的表面都只会产生漫反射,现实中的一些物体会有高光存在,比如金属、塑料、瓷器,甚至一个苹果。
这个闪亮的斑块形成的原因是,苹果表面的这个区域较多反射了来自光源的光线,或者说,苹果的这片区域产生了镜面反射,而反射的光线正好射入了我们的眼睛。我们希望渲染时也能模拟出这种效果。
在理想情况下,如果有一个完美光滑的镜面球体,并且只有一个点光源,那么理论上,只有一个点会精确地反射光源到观察者的眼睛,这个点就是「镜面反射点」,也叫「高光点」。在这种理想情况下,高光是一个点。但是现实中我们看到的往往是一个光斑,而非一个点,这是因为现实世界里的物体本身不完美光滑,表面会有微小的凹凸,这些凹凸会让光线反射的角度略偏于入射角。

正是这种偏移存在,在理想高光点附近的区域,光线也有可能反射到观察者眼睛里,从而形成一个高光区域。那这个高光区域有多大呢?
根据经验判断,我们可以知道高光区域其实是一个中间最亮,四周逐渐变暗的区域。用 CSS 的模拟一下大概长这样:
随着与高光点的距离增加,亮度会先缓慢减弱,再快速减弱,最后在边缘完全消失。由于离高光点比较近的区域光照减弱地很缓慢,所以形成了一片比较明亮的区域。这就是高光区域的形成原理。如何模拟这个随距离变化的亮度呢?我们不做复杂的物理计算,而是使用一个经验公式:
对于
所以我们可以把 specular,该值越大,物体表面越光滑,高光区域就越小。在场景中为每个球体添加 specular 属性(第三个参数):
export const scene = {
// ...
spheres: [
new Sphere(vec3.fromValues(0, -1, 3), 1, vec3.fromValues(255, 0, 0), 500),
new Sphere(vec3.fromValues(2, 0, 4), 1, vec3.fromValues(0, 0, 255), 500),
new Sphere(vec3.fromValues(-2, 0, 4), 1, vec3.fromValues(0, 255, 0), 10),
new Sphere(vec3.fromValues(0, -5001, 0), 5000, vec3.fromValues(255, 255, 0), 1000)
],
}对于每个击中的点,首先根据 specular 属性判断该点是否会产生高光。有两种情况不产生高光:
- 物体表面无任何镜面反射,
specular = 0 ,即实际反射的光线并没有射入观察者眼睛
怎么计算
我们现在有指向光源的向量
这个公式可以通过图像直观理解,

有了
现在条件都具备了,在 computeLighting() 函数中,计算出高光强度并累加到总光照强度中:
function computeLighting(point, normal, specular) {
// ...
for (const light of scene.lights){
// ...
// 无反射光
if (specular < 0) {
continue;
}
// 计算理想反射光 R = 2N(N·L) - L
const r = vec3.create();
vec3.scale(r, normal, 2 * vec3.dot(normal, l));
vec3.subtract(r, r, l);
// 计算视线方向 V, 即击中点指向 camera 的向量
const v = vec3.create();
vec3.subtract(v, cameraPosition, point);
// 计算 R·V, 如果夹角小于 90 度, 则视线方向上有反射光
const rDotV = vec3.dot(r, v);
if (rDotV > 0) {
// cos(α) = (R·V) / (|R||V|)
// I_specular = I * (cos(α))^specular
intensity += light.intensity * Math.pow(
rDotV / (vec3.length(r) * vec3.length(v)),
specular,
);
}
}
// ...
}完成了!从现在的视角里主要能看到绿色球和红色球的高光,绿球的 specular 值较小,所以高光区域较大,而红球的 specular 值较大,所以高光区域较小,符合预期。
阴影
有了光,随之而来的就是阴影。球体和球体之间有遮挡关系,如果一个球体挡住了另一个球体和光源之间的光线,那么被挡住的球体表面就应该变暗,形成阴影效果。而之前的视线里我们并没有考虑这一点。
核心还是修改 computeLighting() 函数,环境光无需考虑遮挡关系,而对于点光源和平行光源,则需要在计算光照强度之前考虑,射到当前击中点的光是否已经被其他物体挡住了。我们之前已经有了 getClosestIntersection() 函数来计算光线最先击中的物体,如果当前击中点所在球体并非是光线最先击中的物体,那么说明当前击中点处于阴影中,不应该计算该光源的光照强度。
在计算光线强度的时候已经有了指向光源的向量 l),那我们就从击中点向光源方向模拟发射一条光线,如果有击中的物体,则说明当前击中点处于阴影中。
之前我们也有设置 minT 和 maxT 来限定击中点的范围,前面一直没用到 maxT,现在能派上用场了。值得注意的一点是,由于点光源是有位置的,所以 maxT 不能是无限大,而是到点光源的距离,而对于平行光源 maxT 则仍然是无限大。
function computeLighting(point, normal, specular) {
let intensity = 0;
for (const light of scene.lights){
// ...
let l = vec3.create();
let tMax;
if (light instanceof PointLight) {
// 点光源: 计算从击中点指向光源的向量
vec3.subtract(l, light.position, point);
// 为什么设置为 1?因为 l 由点光源位置减去击中点位置得到,t 为 1 时表示击中点光源
tMax = 1;
} else {
// 平行光: 方向向量就是光源方向
l = light.direction;
tMax = Infinity; // 平行光没有距离限制
}
// 检查点是否在阴影中
const [shadowSphere, shadowT] = getClosestIntersection(
point,
l,
0.001, // 避免自相交
tMax
);
if (shadowSphere !== null) {
continue; // 在阴影中, 不计算该光源的光照强度
}
// ...
}
return intensity;
}还有一个注意点是 minT 是 0.001 而非 0。这是因为 getClosestIntersection() 中会遍历所有物体,包括出发点所在的物体,如果 minT 是 0, 得到的结果将会是当前物体会是最近的击中物体,从而导致错误地判断当前击中点处于阴影中。将 minT 设为一个很小的值(0.001)就能避免这个问题。
阴影效果的实现还挺简单的,但效果很不错:
反射
感觉现在实现的物体很像台球……现实中如果台球很亮很光滑,是可以反射出外界物体的镜像的,这里也希望实现这个效果。为什么在一个物体上会映出别的物体的样子?比如,我们在物体 A 上看到了物体 B 的镜像。这是由于环境中的光线先集中了物体 B,物体 B 吸收了一些光线,反射了一些携带自身颜色的光线,这些反射光线射向物体 A,物体 A 再把这些光线反射到我们的眼睛里,我们就看到了物体 B 的镜像。

物体 B 发出的光也可能是从物体 C 反射而来的,物体 C 也可能是从物体 D 反射而来的……最终这些光线都源自光源发出的白色光线。所以反射其实就是一个递归的过程,或者说,是 traceRay() 不断调用自身的过程。
为了防止栈溢出,我们得设置一个最大递归深度,书里说设置为 3 就足够了。在 traceRay() 函数中添加一个 maxDepth 参数,在 main 中调用该函数时将它设置为 3。
const color = traceRay(cameraPosition, direction, 1, Infinity, 3);在 traceRay() 函数中,之前一系列的高光、阴影计算之后得到的颜色我们称之为 localColor,表示物体本身的颜色。然后我们需要计算反射光线的颜色 reflectedColor,最后将两者按比例混合得到最终颜色。混合的比例也是物体的一个属性,我们命名为 reflective,表示物体的反射程度,取值范围是
为了支持反射,需要修改 computeLighting() 函数。原先它通过 cameraPosition 计算视线方向,现在需要将视线方向作为一个参数直接传入,因为被追踪的光线不再总是朝向相机了。
// 主动传入 view, 在之前的实现里, 这个向量是 cameraPosition - point 得来, 但在 traceRay() 会递归
// 调用的情况下, 我们把它的计算过程放在 traceRay() 函数内
function computeLighting(point: vec3, normal: vec3, view: vec3, specular: number): number {
// ...
// 将理想反射光的计算(R = 2N(N·L) - L)提取为 reflectRay() 函数
const r = reflectRay(l, normal);
// 高光计算
const rDotV = vec3.dot(r, view);
if (rDotV > 0) {
intensity += light.intensity * Math.pow(
rDotV / (vec3.length(r) * vec3.length(view)),
specular,
);
}
// ...
}最主要的还是对 traceRay() 函数的修改,我们需要计算出 reflectedColor,最终将 localColor 和 reflectedColor 加权返回:
// 由于 `traceRay()` 现在不止是计算摄像机发出的光了,所以函数签名需要修改一下
- function traceRay(cameraPosition, direction, minT, maxT) {
+ function traceRay(startPoint, direction, minT, maxT, maxDepth) {
// ...
// computeLighting 第三个参数为指向视线的方向, direction 向量是出发点指向物体, 因此视线方向为 -direction
const view = vec3.negate(vec3.create(), direction);
// 计算高光和阴影
const localColor = vec3.scale(vec3.create(), closestSphere.color, computeLighting(intersectionPoint, normal, view, closestSphere.specular));
// 递归计算反射光, 达到递归次数上限或击中物体无反光时停止
if (recursionDepth <= 0 || closestSphere.reflective <= 0) {
return localColor;
}
// 从物体 A 指向物体 B 的光线, 可以作为下个 traceRay 的 direction
const reflectedRay = reflectRay(view, normal);
const reflectedColor = traceRay(intersectionPoint, reflectedRay, EPSILON, Infinity, recursionDepth - 1);
// 最终颜色为局部颜色和反射颜色的加权和
return vec3.add(
vec3.create(),
vec3.scale(vec3.create(), localColor, 1 - closestSphere.reflective),
vec3.scale(vec3.create(), reflectedColor, closestSphere.reflective),
);
}为红、蓝、绿、黄球分别添加 0.2、0.3、0.4、0.5 的 reflective 参数,渲染出来看看:
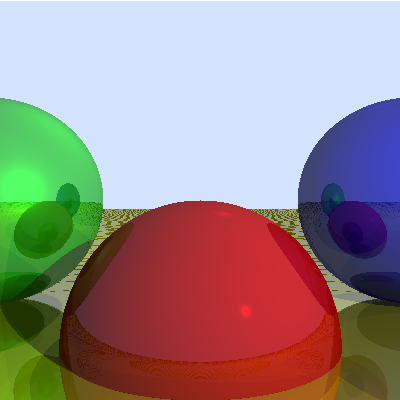
它看起来不是那么好,表示地面的这个大球上出现了奇怪的光斑。一通排查下来发现还是之前提到的「自相交」问题。前面我们是把 minT 设为 0.001,但是引入反射之后,在计算球与球之间反射光线的交叉点时,P = O + tD 中 t 值会变大一些,使它落入了 [minT, maxT],从而导致了自相交。临时的解决方案是把 0.001 改成 0.01,GPT 跟我说了一个更好的方案,即把出发点稍微沿着法线方向移动一点点:
// 计算击中点: P = O + tD
const intersectionPoint = vec3.create();
vec3.scaleAndAdd(intersectionPoint, cameraPosition, direction, closestT);
// 沿法线方向移动一点点,避免自相交
vec3.scaleAndAdd(intersectionPoint, intersectionPoint, normal, 0.001);效果立竿见影,自相交的产生的阴影消失了:
书中作者的实现其实没有自相交问题,因为他自己实现了向量类,使用的是 JavaScript 的 Number 类型,而我使用的
gl-matrix库底层是使用Float32Array来存储向量数据的,比 JavaScript 原生的 Number 类型精度低一些。
GPT 说,在现实世界中的渲染软件中,起点偏移是很常用的防止自相交的技巧。为了保险,这个方式和 minT 限制可以结合使用。
结语
在看这本书之前,我还看过 Ray Tracing in One Weekend,它也是实现了一个简单的光线追踪渲染器,但其中没有讲述光照和阴影的部分,但同时也介绍了一些 Computer Graphics From Scratch 里没实现的如玻璃材质、散焦模糊、抗锯齿等操作。而且 Ray Tracing in One Weekend 还有两个续作,大概看起来是提到了更多的光线追踪技术。所以 Computer Graphics From Scratch 在光线追踪部分相对而言是更简略和简单一些的教程。
书里作者还提到了一些优化,例如并行化、用空间盒减少计算量等。我让 Copilot 在不更改算法的情况下把这些代码移植到了 WebGL,确实有立竿见影的加速效果,渲染 400px 宽高的场景时间由 250ms 降到了 10ms 左右。如果要求 60 FPS,渲染时间其实是需要低于 16.7ms。介于本文中渲染的只是一个尺寸较小、没做抗锯齿优化的场景,感性判断,在现代场景中实现实时光线追踪还是很难的,估计 UE 这种游戏引擎做了相当多的黑魔法。